NOAA's real-time tsunami forecasting scheme is a process that comprises of two steps: (1) construction of a tsunami source via inversion of deep ocean DART observations with precomputed tsunami source functions and (2) coastal predictions by running high-resolution forecast models in real time [Titov et al., 1999, 2005].
In the context of this paper, a tsunami source is a sea surface deformation that generates a series of modeled long waves reproducing observed tsunami wave characteristics, including arrival time, height and period in deep ocean. Reconstructing a tsunami source does not necessarily require knowing the details of the earthquake focal mechanism [Wei et al., 2008; Tang et al., 2008a]. Wave dynamics of tsunami propagation in deep ocean is assumed to be linear [Liu, 2009]. Thus a tsunami source can be effectively constructed based on the best fit to given deep ocean tsunami measurements from a linear combination of precomputed tsunami source functions.
The sea surface deformation is computed using an elastic deformation model [Gusiakov, 1978; Okada, 1985]. This deformation directly links the tsunami source functions with the earthquake fault parameters and magnitudes. The deformation model assumes that an earthquake can be modeled as the rupture of a single rectangular fault plane that is characterized by parameters describing the location, orientation and rupture direction of the plane. Titov et al. [1999, 2001] conducted sensitivity studies on far-field deep water tsunamis to different parameters of the deformation model, including length of the rupture plane, the width of the plane, the depth of the source, dip angle, strike angle and the average slip amount. The results showed source magnitude and location essentially define far-field tsunami signals for a wide range of subduction zone earthquakes. Other parameters have secondary influence and can be predefined during forecast. Based on these results, tsunami source function databases for Pacific, Atlantic, and Indian Oceans have been built using predefined source parameters with length 100 km, width 50 km, slip 1 m, rake 90 and rigidity 4.5 × 1010 N/m2. Other parameters are location specific; details of the databases are described by Gica et al. [2008]. Each tsunami source function (TSF) is equivalent to a tsunami from a typical Mw = 7.5 earthquake with defined source parameters. Figure 1 shows the locations of tsunami source functions in the databases.
Several real-time data sources, including seismic data, coastal tide gauge and deep ocean data have been used for tsunami warning and forecast [Satake et al., 2008; Whitmore, 2003; Titov, 2009]. NOAA's strategy for the real-time forecasting is to use deep ocean measurements at DART buoys as the primary data source due to several key features. (1) The buoys provide a direct measure of tsunami waves, unlike seismic data, which are an indirect measure of tsunamis. (2) The deep ocean tsunami measurements are in general the earliest tsunami information available, since tsunamis propagate much faster in deep ocean than in shallow coastal area where coastal tide gauges are used for tsunami measurements. (3) Compared to coastal tide gauges, DART data with a high signal-to-noise ratio can be obtained without interference from harbor and local shelf effects. (4) The linear process of tsunamis in deep ocean allows application of efficient inversion schemes.
Time series of tsunami observations in deep ocean can be decomposed into a linear combination of a set of tsunami source functions in the time domain by a linear least squares method. We call coefficients obtained through this inversion process tsunami source coefficients. The magnitude computed from the sum of the moment of TSFs multiplied by the corresponding coefficients is referred as the tsunami moment magnitude (TMw), to distinguish from the seismic moment magnitude Mw, which is the magnitude of the associated earthquake source. While the seismic and tsunami sources are in general not the same, this approach provides a link between the seismically derived earthquake magnitude and the tsunami observation-derived tsunami magnitude. Under certain circumstances, Mw and TMw can be equal if the initial sea surface deformation of the DART-constrained tsunami source (linear combination of TSFs) would be the same as the surface deformation due to the seismically constrained fault model (usually a linear combination of finite faults). However, in most cases, they will be different due to factors ranging from different model assumptions defining these two magnitudes to the different physical processes that are recorded at seismometers and at tsunameters. While the numerical difference is usually small (partially due to the logarithmic scale of the magnitudes) in some rare cases it can be substantial. Though a thorough discussion about the relationship between the two magnitudes is out of the scope of this paper, it will be presented in forthcoming studies.
During real-time tsunami forecast, seismic waves propagate much faster than tsunami waves so the initial seismic magnitude can be estimated before the DART measurements are available. Since time is of essence, the initial tsunami forecast is based on the seismic magnitude only. The TMw will update the forecast when it is available via DART inversion using the TSF database. As will be shown in our examples, TMw appears to be a robust measure of the tsunami impact. So we focus our forecast analysis on defining TMw.
The database can provide offshore forecast of tsunami amplitudes and all other wave parameters immediately once the inversion is complete. The tsunami source, which combines real-time tsunami measurements with tsunami source functions, provides an accurate offshore tsunami scenario without additional time-consuming model runs.
High-resolution forecast models are designed for the final stage of the evolution of tsunami waves: coastal inundation. The DART-constrained tsunami source, corresponding offshore scenario from the TSF database, and site-specific forecast models cover the entire evolution, providing a complete tsunami forecast capability.
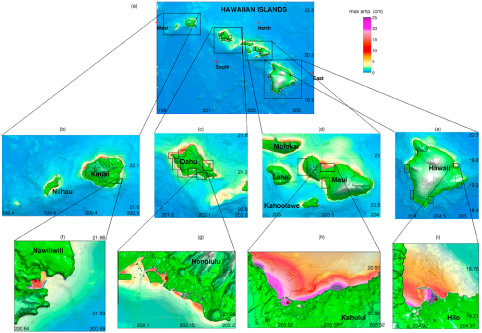
Once the DART-constrained tsunami source is obtained (as a linear combination of TSFs), the precomputed time series of offshore wave height and depth-averaged velocity from the model propagation scenario are applied as the dynamic boundary conditions for the forecast models. This saves the simulation time of basin wide tsunami propagation. Tsunami inundation is a highly nonlinear process, therefore a linear combination would not, in general, provide accurate solutions. A high-resolution model is also required to resolve shorter tsunami wavelengths nearshore with accurate bathymetric/topographic data. The forecast models are constructed with the Method of Splitting Tsunami (MOST) model, a finite difference tsunami inundation model based on nonlinear shallow water wave equations [Titov and González, 1997]. Each forecast model contains three telescoping computational grids with increasing resolution, covering regional, intermediate and nearshore areas. Runup and inundation are computed at the coastline. The highest resolution grid includes the population center and tide stations for forecast verification. The grids are derived from the best available bathymetric/topographic data at the time of development, and will be updated as new survey data become available. Figure 2 shows the forecast model setup for several tsunami forecast models in Hawaii, detailing the telescoping grids used. (1) One regional grid of 2 arc min (∼3600 m) resolution covers the main Hawaiian Islands (Figure 2a). (2) Then the Hawaiian Islands are divided into four intermediate grids of 12 to 18 arc sec (∼360–540 m) for four natural geographic areas: Ni'ihau, Ka'ula Rock, and Kauai (Kauai complex) (Figure 2b); Oahu (Figure 2c); Molokai, Maui, Lanai, and Kaho'olawe (the Maui Complex) (Figure 2d); and Hawaii (Figure 2e). (3) Each intermediate grid contains 2 arc sec (∼60 m) nearshore grids (Figures 2f–2i).
Fig. 2. Forecast model setups in Hawaii: (a) 2 arc min (∼3600 m) regional, (b–e) 12–18 arc sec (∼360–540 m) intermediate, and (f–i) 2 arc sec (∼60 m) nearshore grids for Nawiliwili, Honolulu, Kahului, and Hilo. Filled colors show the maximum tsunami amplitude in cm computed by the forecast models for the 17 November 2003 Rat Islands tsunami. Red dots, coastal tide stations; red crosses, offshore locations.
The forecast models are optimized for speed and accuracy. By reducing the computational areas and grid resolutions, each model is optimized to provide 4 hour event forecasting results in minutes of computational time using one single processor, while still providing good accuracy for forecasting. To ensure forecast accuracy at every step of the process, the model outputs are validated with historical tsunami records and compared to numerical results from a reference inundation model with higher resolutions and larger computational domains. Figure 3 shows the telescoping grids for the Kahului reference inundation model with 36, 6 and 1/3 arc sec (∼1080, 180 and 10 m) grid resolutions. In order to provide warning guidance for long duration during a tsunami event, each forecast model has been tested to output up to 24 hour simulation since tsunami generation.
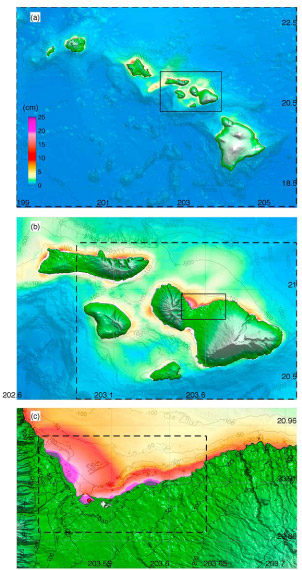
Fig. 3. Grid setup of the Kahului reference inundation model. The spatial resolutions are (a) 36 arc sec (∼1080 m), (b) 6 arc sec (∼180 m), and (c) 1/3 arc sec (∼10 m), respectively. Filled colors show the maximum amplitude in cm computed by the model for the 17 November 2003 Rat Islands tsunami. Solid lines, boundaries of the telescoping grids of the model; dashed lines, grid boundaries of the Kahului forecast model as in Figures 2a, 2d, and 2h.
Return to Previous section
Go to Next section