The tragedy of the 2004 Indian Ocean tsunami made obvious the vulnerability of coastal populations to this deadly natural disaster and illustrated the need for effective forecasting. In the aftermath of the tsunami, the acceleration of development and implementation of more advanced tsunami forecast systems worldwide has become a major priority in the scientific and disaster management communities [Titov, 2009; Lautenbacher, 2005; Synolakis et al., 2005; Bernard et al., 2006; Geist et al., 2006; Synolakis and Bernard, 2006]. New forecast systems are being developed and implemented in many coastal nations. Major efforts are underway in the U.S, Japan, Australia, Indian and Indonesia [Titov, 2009; Kuwayama, 2007; Greenslade et al., 2007; Nayak and Kumar, 2008; Rudloff et al., 2008; Sobolev et al., 2006]. The U.S. system applies a combination of seismic and direct tsunami wave measurements with real-time inundation modeling for coastal predictions. Other systems are based primarily on indirect tsunami measurements (e.g., seismic and GPS shield data) and precomputed modeling.
After the 2004 Indian Ocean tsunami, the U.S. expanded the role of the National Tsunami Hazard Mitigation Program to implement the recommendations of the National Science and Technology Council [2005] to enhance tsunami forecast and warning capabilities along the U.S. coastlines. Toward these goals, the NOAA Center for Tsunami Research at NOAA's Pacific Marine Environmental Laboratory is developing a tsunami forecast system for NOAA's Tsunami Warning Centers [Titov et al., 2005; Titov, 2009]. The forecast system combines real-time deep ocean tsunami measurements from Deep-ocean Assessment and Reporting of Tsunami (DART) buoys [González et al., 2005; Bernard et al., 2006; Bernard and Titov, 2007] with the Method of Splitting Tsunami (MOST) model, a suite of finite difference numerical codes based on nonlinear long wave approximation [Titov and Synolakis, 1998; Titov and González, 1997; Synolakis et al., 2008] to produce real-time forecasts of tsunami arrival time, heights, periods and inundation. To achieve accurate and detailed forecast of tsunami impact for specific sites, high-resolution tsunami forecast models are being developed for U.S. coastal communities at risk. The resolution of these models has to be high enough to resolve the dynamics of a tsunami inside a particular harbor, including influences of major harbor structures such as breakwaters. These models have been integrated as crucial components into the forecast system.
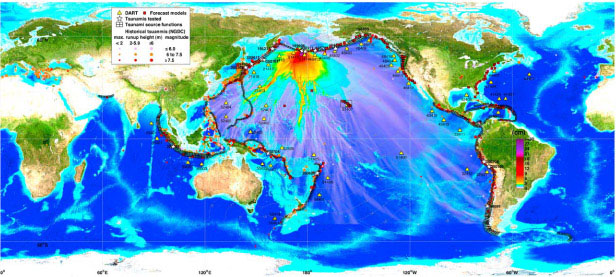
Presently, a system of 48 DART buoys (39 U.S., 1 Chilean, 6 Australian, 1 Thailand, and 1 Indonesia owned) is monitoring tsunami activity in the Pacific, Indian and Atlantic Oceans (Figure 1). The precomputed tsunami source function database currently contains 1691 scenarios to cover global tsunami sources, and the forecast models are now set up for 43 U.S. coastal communities. The fully implemented system will use real-time data from the DART network to provide high-resolution tsunami forecasts for at least 75 communities in the U.S. by 2013 [Titov, 2009]. Since its first testing in the 17 November 2003 Rat Islands tsunami, the forecast system has produced experimental real-time forecasts for 12 tsunamis in the Pacific and Indian oceans [Titov et al., 2005; Wei et al., 2008; Titov, 2009]. The forecast methodology has also been tested with the data from nine additional events that produced deep ocean data [Titov et al., 2005; Tang et al., 2008a]. In the study, we test fourteen tsunamis as summarized in Table 1 for model validation and forecast accuracy.
Fig. 1. Overview of the tsunami forecast system. Components of the system include DART systems (yellow triangles), precomputed tsunami source function database (black rectangles), and high-resolution forecast models (solid red squares). Colors show computed maximum tsunami amplitudes of the offshore forecast in cm using the 17 November 2003 Rat Islands tsunami as an example. Black contour lines indicate tsunami travel times in hours. Solid circles are historical tsunamis [National Geophysical Data Center, 2007].
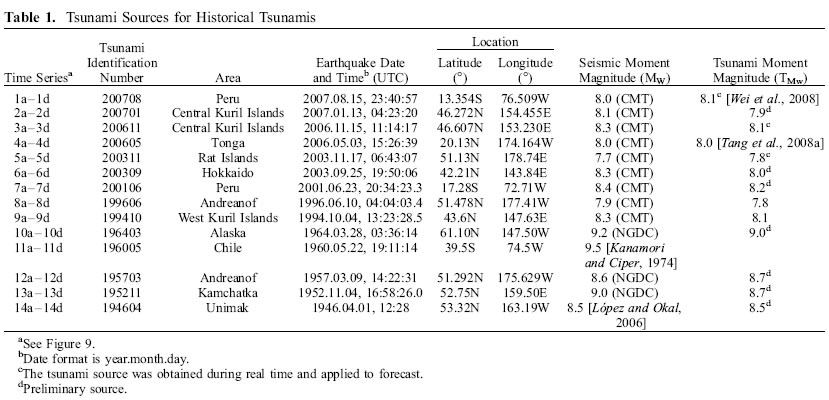
Table 1. Tsunami sources for historical tsunamis.
The three main components of the forecast system, the DART observing network, tsunami source function databases and the forecast models, reflect the three main stages of the evolution of tsunami waves: generation, deep ocean propagation, and coastal inundation. This study focuses on the last stage to provide the final products during a real-time tsunami forecast. Here we present an overview of the research toward development, validation and applications of the high-resolution forecast models by using sites in Hawaii as examples. Secondary objectives are to investigate local frequency responses to tsunamis by wavelet analysis; and the non-linearity between the offshore and nearshore wave heights.
Section 2 of this article introduces NOAA's tsunami forecast methodology and demonstrates forecast model setups for Hawaii. Section 3 describes the development and testing of the forecast inundation models. The development process includes creation of bathymetric and topographic data sets, model sensitivity studies, model validation and error estimation, and testing for model robustness and stability. Procedures for future model development are also suggested. Section 4 presents a tsunami hazard assessment study utilizing the validated forecast models and comparisons of modeled offshore and nearshore wave heights. Summary and conclusions are provided in section 5.
Return to Abstract
Go to Next section