
|
|
Latitude 45° 56.0' North, Longitude 129° 59.0' West Teacher
at Sea: |
Hit
the decks, ROPOS has taken a dive! I'm so excited-I've been here three days and I already have a job on the ship! Susan Merle, a research assistant from Oregon State University just trained me to be the keeper of order for the video logs that are taken when ROPOS is working on the seafloor. Other scientists and I will take four hour shifts monitoring the video data to make sure the logs are properly kept. Since this cruise is so multidisciplinary, you might imagine that each scientist might want a video recording of a different aspect of the ROPOS dive. At any given moment, folks running the video monitors may be shuffling between four sets of recording devices plus the "frame grabs", which are snapshots of any particularly interesting piece of video that will be saved separately. Videos are very important because they provide the scientists with a visual record of the environment around their sampling gear. They can be reviewed when the scientists return to shore and their memories fade. And what memories we all will have! We see squid dancing past us, pausing momentarily to squirt us with their ink as they try to scare us away. As the squid begin to realize that we're not that easily scared away, they give up and move along. Then we are treated to what looks like an underwater snowstorm, but is actually bacterial floc, plankton, and detritus. Some of these tiny snowflake-resembling particles are drifting through the water column and are captured on video as ROPOS descends, and others are kicked up from the bottom by ROPOS's thrusters.
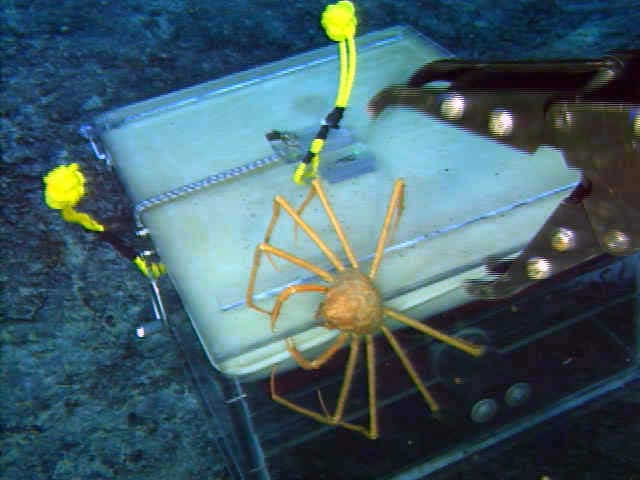
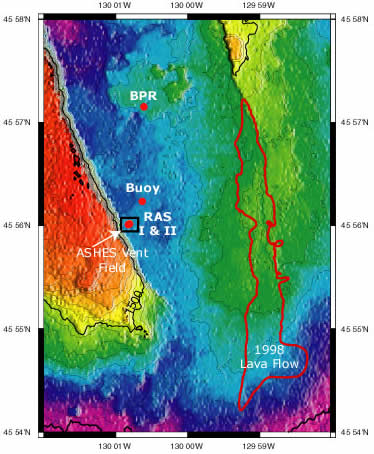
Finally, we have reached the bottom! It is so beautiful here at Cloud Vent (on the 1998 lava flow at Axial Volcano). I'm awed by the image of white billowing strands of bacteria waving to us in my first "real time" image of a live vent. Just when I thought it couldn't get any more exciting, I hear Dr. Bob Embley say, "There it is!! There's the RAS!!" The RAS is the interactive vent fluid sampler that has been on this site for a whole year. It consists of an acoustic modem, pump, intake valve, three temperature probes, a pH sensor, and computer that controls the whole thing. It has been equipped to hold 46 samples that are taken once per week (except for pH, which has been programmed for twice a week). One of the most fascinating things I learned about this piece of high-tech genius is that it has an acoustic link that allows it to communicate with scientists on land, a feature that worked briefly last year, but after about a week mysteriously went silent (NeMO Net). The model that will be deployed during this cruise has been fitted with modifications and new technology that should improve the communication abilities of RAS.
Through a surface buoy with a satellite link, scientists will be able to send RAS commands and retrieve data from it. I pictured Dr. David Butterfield back in his lab on shore saying, "Good morning, RAS, today I'd like you to take some water samples and add a preservative to a few of them so that my colleague, biological oceanographer Sheryl Bolton will be able to use them for DNA analysis". Those DNA samples would be ready and waiting to be picked up before the ship even arrived! Another important job of the communication link is enabling scientists to respond to future events, such as earthquake swarms or eruptions. As you can imagine, everyone is thrilled to see that the RAS sampler, the larval arrays, and the bacterial traps are still at the site and intact. Now comes the torture! We have to wait until they are brought to the surface to see how they fared over time, to see what treasures they hold, and to understand why the RAS stopped communicating with scientists. |
|||||||||||||
| Student's
Question of the Day:
C.G., Age
14 , Crown Point, Indiana, asks: ROPOS picks up equipment with one or both of its manipulator arms. It can lift 50-100 pounds. Could it pick up you? For heavier objects, some flotation can be added so ROPOS can move them. Knowing where ROPOS is on the bottom involves two parts. First, we always know where the ship is because of the instrument called a GPS (Global Positioning System) Receiver that is located on the bridge of the ship. Since ROPOS has a cable that we use to lower it down into the water, it doesn't get too far away from the ship (kind of like a puppy on a retractable leash). By the way, that's the same cable we use to collect video images and send ROPOS commands. Second, we also put down acoustic beacons called transponders and then determine their positions precisely. ROPOS is very good in math! In just a few minutes, it can use the time it takes for sound to travel from itself to the beacons and back to calculate its position. During this expedition, we are using transponder beacons that were put in place four years ago. |
|||||||||||||
| NeMO 2002 |About NeMO | Expedition | NeMO Net 2002 | Explorer | Dive! | Education |


{kind=link}