|

Teacher's Report
Bill Hanshumaker, Educator at Sea
| |

Kim Wallace, electronic technician with the
ROPOS group. |
Researcher Interview:
Kim Wallace
Electronic Technician
ROPOS: Remotely Operated Platform for Ocean Science
Victoria, BC Canafa
Bill:
Tell me about how the ROPOS group is organized.
Kim:
ROPOS is operated by the Canadian Scientific Submersible
Facility (CSSF) and receives no governmental subsidies. CSSF is a non-profit
group of scientists who put the vehicle back into operation after funding
was removed by the Canadian government. There is only one full-time employee.
The rest of the staff are contract employees who only work with ROPOS
as needed. There is a crew of 10 on this trip. I've been working with
ROPOS since August of 1996.
Bill:
What are your responsibilities?

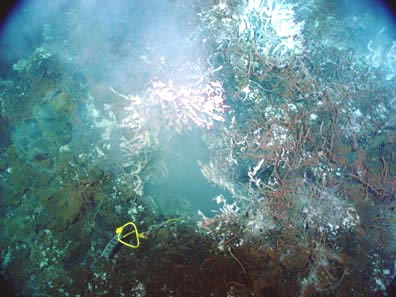
Cloud
vent, has been spewing hot water out of this cavernous hole in the
seafloor since the 1998 eruption. Tubeworms bask in the warm flow.
Two temperature probes were placed in the pit, which will be recovered
next year by grabbing the yellow line in the lower left of the image. |
|
Kim:
I am primarily as an electronic technician. My responsibilities
include remotely operated vehicle (ROV) maintenance, upgrades and interfacing
of the science electronics. We share most of the operational responsibilities,
from launch to recovery, to the actual control of ROPOS while underwater.
Bill:
How did you receive your training?
Kim:
After studying engineering technology for three years at Ryerson, I
worked mainly in industrial controls, communication and later in power
supply technology. These fields have direct applications for what we do
here. Communication, telemetry, power supply and distribution have
targeted applications in the vehicle as well. There are distributed
power supplies all around the vehicle that are fed via the umbilical
line connecting ROPOS to the Thompson. ROPOS has a suite of inputs and
sensors, with end effector and microprocessor-based control and feedback
systems, just like an industrial control system.
Bill:What
is an example of an "end effector"?
| |

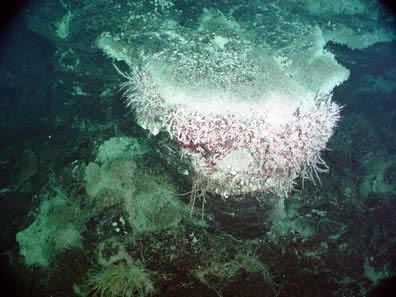
Marker-113 vent is located on the western
edge of the 1998 lava flow. The vent sits on the edge of a collapse
pit. |
Kim:
Theses are the controls that operate the arm, motors, lights, cameras
and hydraulic functions.
Bill:
What developments do you see for the future?
Kim:
Most of the other ROVs are heavily subsidized, and we have
to compete with that. But we are good at what we do and we have contracts
lined up. The optimistic view is to bring a second vehicle on line and
expand the operations.
Bill:
How would that vehicle look different from this ROPOS?
Kim:
ROPOS can dive to a 5000-meter depth. But most of our work is like what
we're doing here, in water above 3000 meters. Because of the oil industry,
much of the equipment capable of going to that depth can be bought off
the shelf, at a much lower price. The second vehicle could be less expensive
and available for the research needed above 3000 meters. This ROPOS would
be reserved for the deeper explorations.
Bill:
If someone were interested in a position like yours, what sort of advice
would you give?
Kim:
There are very few places that train ROV people. Electronics, mechanical
and hydraulic technologies are important trades for persons working in
ROV support. You need to have at least one or more of those skills.
Robotic engineering has perhaps the most similar requirements. However,
most of the skills are acquired on the job. A big part of what someone
needs is congeniality. This is a team operation. We've been out here
47 days in a row, working 12 hours a day, 7 days a week. We get along,
and you have to be able to do that. A lot of it is your attitude. You
can teach someone to do anything. But you need a good work ethic and to
be able to play well with others.
|